


友情链接:
- 巡视遥测机器人
多旋翼式架空线路巡检机器人
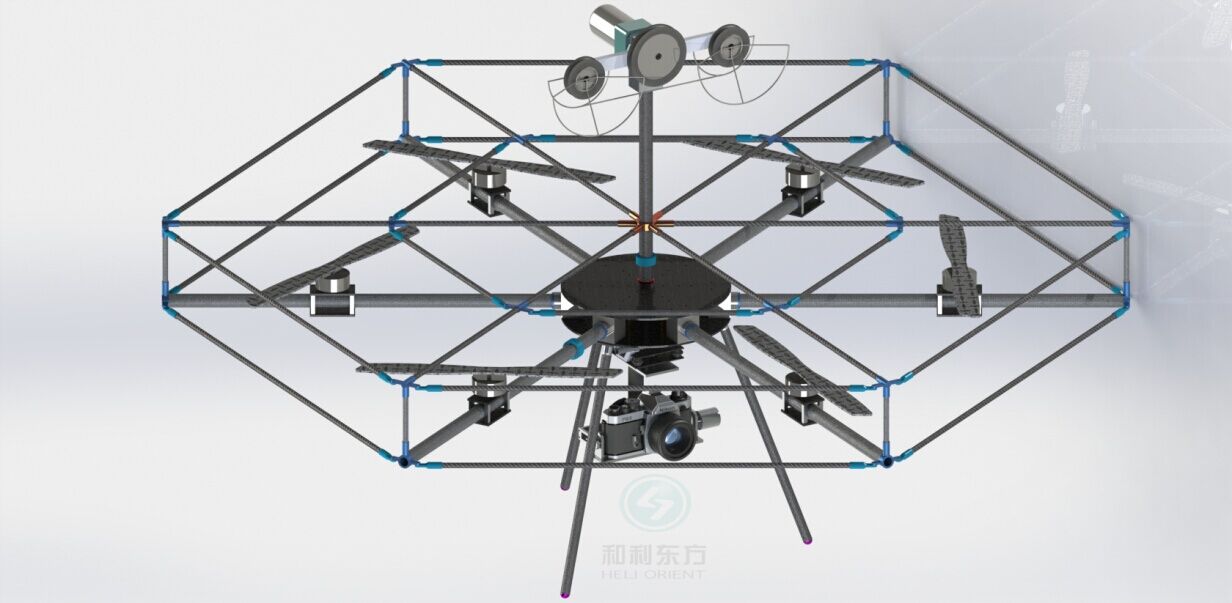

多旋翼式架空线路巡检机器人
(1)功能简介
近几年根据国家电网的发展需要,传统人工巡检输电线路正在朝着无人巡检方向发展,进而涌现了一系列机器人的研究课题,如:输电线路巡检机器人、无人值守变电站、变电站智能巡检机器人、电力线路智能操作机器人等。这些机器人的研究和使用,使得少人或无人线路巡检成为可能,推动了电力电网的自动化水平,节省了大量人力物力,保证了电网的安全运行。针对架空输电线路人工巡检和维护劳动强度大、作业危险性大、工作条件艰苦、劳动效率低等问题,研究输电线路两栖巡检无人机系统及其控制和作业技术,用于电网的“智能”巡检和综合维护。
本产品将多旋翼无人机技术和巡检机器人技术融合应用于电力线路的巡检和综合维护。既利用多旋翼无人机技术的灵活性、稳定性和易操控性,又利用线上机器人技术的近距离、针对性和智能性,使二者有机结合,保证了机器人既能够垂直起降和飞行,同时又能够着线行走和离线飞行,从而克服巡检机器人越障的难题以及两种技术各自的局限性,最大限度的发挥二者在“坚强智能电网”输电线路维护中的优越性。
1) 两栖无人机能够实现飞行和线上行走两种功能;
2) 通过无线传输控制指令对无人机进行飞行和行走控制;
3) 具有无线图传和云台装置,从而实现巡检功能;
4) 两栖无人机通过人为干预遥操作实现平稳着线和离线功能;
5) 飞行时间满载约为8-15分钟;
6) 载荷尽量控制在3-3.5kg ;
7) 两栖无人机线上行走无遮挡遥控距离和图传距离约为1km ;
8) 线上行走速度约为1-1.5km/h;
9) 两栖无人机在不带电的架空输电线路地线上行走平稳;坡角<30°;
10)垂直起降,飞行速度5~50Km/h,飞行高度:≤1000米(相对高度);
11)正常起降风速:≤6级;工作湿度:5%~95%无冷凝;工作温度:-20℃~50℃。
产品名称 | 多旋翼式架空线路巡检机器人 |
产品型号 | HELIUAV 1.0 |
适用范围 | 不带电的架空线路地线 |
主桨材料 | 碳纤维 |
启动方式 | 遥控 |
接收机 | Futaba |
供电方式 | 12V锂离子可充电电池*2 |
持续工作时间 | 约15分钟 |
无线数传/图传 | 约2km |
最大载荷 | 3~3.5kg |
电机转速 | 1200—6500 rpm |
线上行走坡度 | < 30度 |
飞行速度 | 5~50km/h |
最大爬升速度 | 约2米/秒 |
最大下降速度 | 约4米/秒 |
线上行走速度 | 1~1.5 km/h |
起飞降落保护 | 半自动 姿态速度控制 |
飞行保护 | 自动悬停 自动飞回出发地 |
悬停精度 | 垂直:0.5米 水平:2.5米 |
最大海拔高度 | 2000米 |
飞行高度 | < 1km |
起降风速 | < 6级 |
使用工作条件 | 环境温度:-15℃~40℃,相对湿度:≤75% 大气压力:86KPa ~ 106KPa |
贮存条件 | 环境温度:-25℃~40℃,相对湿度:≤90% 大气压力:86KPa ~ 106KPa |
整机重量 | 约8kg |
整机尺寸 | 1.5m×1.5m×1.1m |
| 上一篇:多旋翼式高光谱遥感机器人 | 下一篇:无 |