


- 工业机器人
码垛机械手
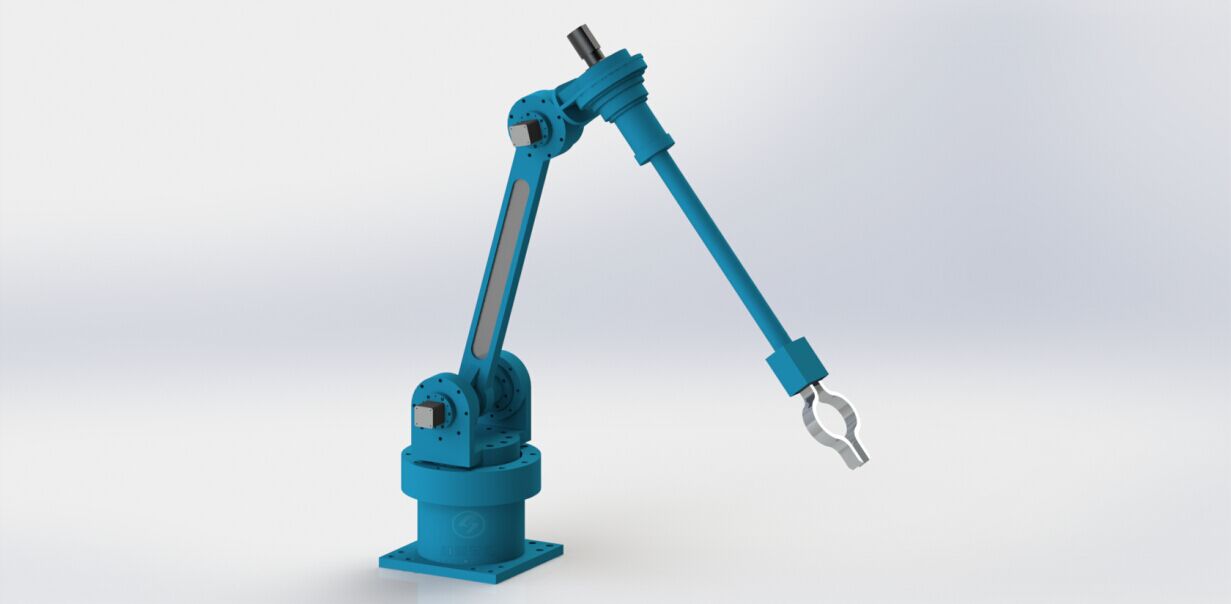

搬运机械手
(1)功能简介
码垛机械手是近几十年发展起来的一种高科技自动化生产设备。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。搬运作业是指用一种设备握持工件,从一个加工位置移到另一个加工位置。搬运机械手可安装不同的末端执行器以完成各种不同形状和状态的工件搬运工作,大大减轻了人类繁重的体力劳动。机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。本产品是全自动智能生产无人车间系统中的一部分,可以实现当其他传送设备工作条件不允许时,通过多种传感器实现机械手抓取物品的准确定位、准确抓取、特定轨迹的移动以及特定角度的放置等,在这个过程中节省了大量人力。
(2)技术特点
1) 通过无线传输控制指令对机械手进行控制和数据传输;
2) 机械手可以通过更换末端执行器来适应不同形状、尺寸、重量的多种物品的抓取;
3) 机械手不受有毒气体的影响,可以在各种生产条件下工作;
4) 机械手进行示教后有较高的重复定位精度,可以不厌其烦的进行相同的动作;
5) 机械手可以应用于各种自动化领域;
6) 机械手可以替代人工,大大提高生产效率,节约大量人力成本;
7) 机械手具有语音播报能力和故障报警能力;
(3)技术参数
产品名称 | 搬运机械手 |
产品型号 | HELIBOTS2.0 |
专利号 |
|
适用范围 | 各种自动化生产流水线 |
末端执行器 | 机械手爪、吸盘等 |
末端承重 | 5kg |
供电方式 | AC220V,50HZ |
持续工作时间 | 6~8小时 |
安装方式 | 挂壁、落地、斜置、倒置 |
物品抓取精度 | 5-15mm |
定位精度 | 0.1mm |
手爪抓取载荷 | 30—50kg |
抓取成功率 | >99% |
抓取载荷长度 | 1.2m |
机械手轴1基座最大转角 | +360度 ~ -360度 |
机械手轴2大臂最大转角 | +110度 ~ -110度 |
机械手轴3小臂最大转角 | +150度 ~ -150度 |
机械手轴4翻转最大转角 | +360度 ~ -360度 |
使用工作条件 | 环境温度:-15℃~40℃,相对湿度:≤75% 大气压力:86KPa ~ 106KPa |
贮存条件 | 环境温度:-25℃~40℃,相对湿度:≤90% 大气压力:86KPa ~ 106KPa |
整机重量 | 50kg |
整机尺寸 | 1000×270×1200(mm) |
| 上一篇:无 | 下一篇:轮式自主移动喷漆机器人 |